


산업용 로봇
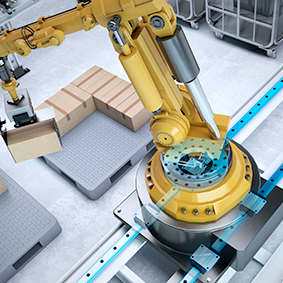
로봇은 다양한 업종에서 작업물을 빠르고 정확하게 배치하기 위해 사용됩니다. 일부 로봇은 직교 운동 이외에도 인간 팔의 움직임을 흉내낼 수 있도록 다중 조인트 어셈블리를 갖고 있습니다. 이러한 조인트부는 갑작스러운 중지에도 이탈하지 않도록 하기 위해 높은 스윙 정도와 고강성을 가져야 합니다. THK의 독창적인 제품은 강력하며 작기 때문에 이러한 요건을 충분히 충족시킵니다.
다관절 로봇
가속 및 감속의 한계에 도전하는 포지셔닝 로봇입니다. 가이드 섹션은 높은 정도와 강성을 가져야 하며 기본 구조는 정지 도중 뛰어난 감쇠성을 보여야 합니다. 이러한 강성과 속도를 제공하기 위해 스윙 섹션에 크로스 롤러링이 사용됩니다.
아크 용접 로봇
크로스 롤러링은 공장 생산 라인의 아크 용접 로봇 조인트의 회전 운동부에 사용됩니다. 크로스 롤러링만으로도 레이디얼 및 축 운동의 각 하중 방향에서 충분히 견고하기 때문에 로봇의 콤팩트한 조인트 개발에 사용될 수 있습니다.
스칼라 로봇
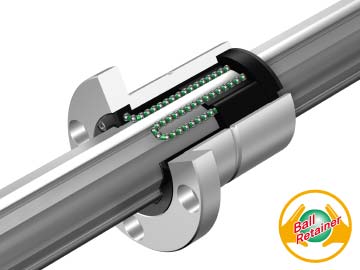
스칼라 로봇은 작은 영역 내에서 물건을 이송 및 배치하는 데 사용됩니다. LM가이드 시스템은 빠른 속도와 적은 흔들림이 필수적인 Z축 회전 및 스트로크 운동 모두에서 높은 정확성을 구현하는 데 필요합니다.
이중 암 로봇
인간 팔의 움직임을 흉내내도록 설계된 이중 암 로봇은 반복되는 복잡한 동작을 부드럽게 수행할 수 있어야 합니다. 또한 로봇은 고강성을 지녀야 하며 빠른 응답성을 보여야 합니다. THK의 LM 시스템 및 크로스 롤러링은 강성과 작동 속도를 증가시키는 동시에 로봇의 크기를 줄여줍니다.