


工業機器人
在許多工業中,都會使用機械手臂來迅速、精確地將工作部件定位。某些機械手臂具有多重關節組件,因此使用範圍並不侷限於直角運動,還能模擬人類手臂的動作。這些關節部份必須具有高擺盪精確性與高剛性,以確保瞬間停止時不會產生偏差,而 THK 產品不僅性能優越,更具備精巧的外型,因此能夠滿足這些需求。
5 關節封閉式機械手臂
可挑戰加速與減速極限的定位機械手臂。此類產品的引導部位必須具有高精確度與高剛性,而且基本架構必須能夠在停止時展現優越的緩衝性能。因此,此產品在擺盪部位使用了交叉滾柱軸承,以實現所需的剛性與速度。
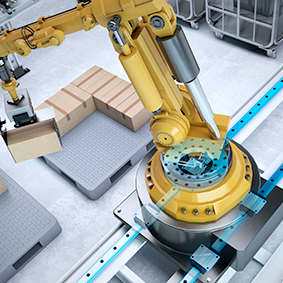
電孤銲機械手臂
工廠的生產線中常使用的電孤銲機械手臂,其關節旋轉件中即使用了交叉滾柱軸承。由於交叉滾柱軸承本身對各徑向與軸向力矩負荷具有足夠的剛性,因此可以用來設計精巧的機械關節。
組裝機器人
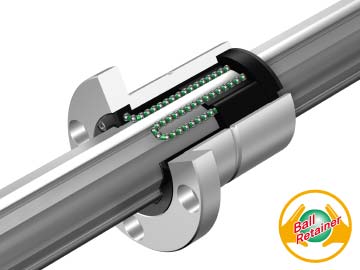
組裝機器人的功用,是在狹小空間中搬運及放置工作部件。由於 Z 軸上的行程移動與旋轉必須具備高速及低偏轉的特性,高精確度的 LM 導軌(線軌)系統便成為其中的關鍵零件。
雙臂式機器人
模擬人類手臂運動所設計的雙臂式機器人,必須能夠流暢地重複執行複雜的動作。此外,機械手臂必須夠堅固,並且能夠進行高速反應。在這方面,THK 的直線運動系統及交叉滾柱軸承能夠減少機械手臂大小,同時增加剛性及操作速度。